Bob's Lost In Space B9 Robot Project | home
Misc. Parts | Motor Shaft Extensions | Knees & Hinges | Treadsections | Tread Making | TreadMaking from Tires | Drive Parts | Drive & Tread Installation | Tread movie | Barry's Tread Movies | Drive Upgrade | Legs | Donut & Waist plate | First Stackup | Torso | Neon | Arms | Microphone & Knob | Chest Buttons | Power Pack | Torso Vents Misc | Making Vents | Large Vent Drawings | Arm Mechanism #1 | B9 Arm Mech Dev. | Wrists & Claws | Collar | Radar | Motorizing Ears | Making Sensors | Brain | Brain Cup & Light Rods | Bulbs & Wiring Diagrams | My Old Robots | B9 Builder's & Info Sites | Related Links | Building Reference Info | Parts Drawing Links | Site Revisions | Final Leg Assembly | Leg & Hip Assembly | Leg-Hip Action | Non-B9 Projects | 2008 TX BUILD-OFF | 2008 TX BUILD-OFF PAGE 2 | RoboCon 2009
Arm Mechanism Design #1
"Homemade Linear Actuators"
built by Doug Wethington



Club Member Contribution - Inexpensive working Arm Mechanism

WOW! A full 18" of arm extension!!
Built by Doug Wethington,
dougmwethington@webtv.net
Doug is a club member and collaborator on the resurrection of my old robot's arm mechanism for his B9 robot.
We began discussing this at the end of December 2001 and Doug has managed to do his prototype and put both arms all together in a short period of time. I've included Doug's personal construction comments too.
Simple Design & Inexpensive
This is a relatively simple mechanism that almost anyone can build. If you can cut straight with a hacksaw, have an electric drill with sharp bits and live close to a good hardware store, you can size up and assemble this for your robot to allow the arms to extend and retract. Total cost about $75 total to mechanize both arms.
The design uses heavy duty drawer slides, new surplus car wiper motors, and a rope drive cable which provides a slip clutch action on drive shaft to eliminate the need for end limit switches. Doug also added a simple elastic linkage that allows the claws to open as the arm extends. You can control this with a simple reversing switch or you can get fancy and add sensors and electronic motor controllers depending on your own control scheme.

Fully retracted.

Extended halfway. "The arms are fairly quiet. They have a slight whirling sound to them which to me just adds to the realism." Doug.

Again - Fully Extended! What a reach!!
As far a Bob May could reach in the real robot costume!!
"After I finished the second arm I totaled up the cost for the both and it was around $70 or $75 and that's not bad at all." The elastic bands to open the claws were not hooked up when I took this last set of pics. I just didn't hook it up for some reason, but they are now." Doug.
Arm Support
In constructing the arm mechanism, you will also be creating an internal support system for each arm since they are isolated from the torso with the exception of the arm bellows that cover the mechanism. This support can be bolted to a support plate attached to the lazy Susan.
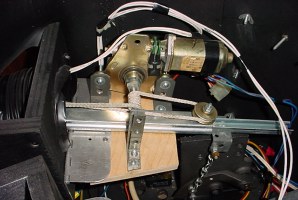
Here is a pic of my original garage junk box mechanism that Doug based his B9 mechanisms on.
Extended halfway out. (more pics)
Doug's Prototype Arm Assembly for his B9
Doug first built a bench top prototype that would later be slightly modified to fit into his B9 robot torso. Here are a few pics of the prototype.
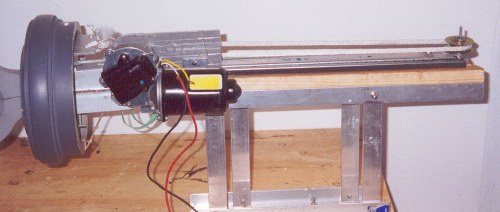
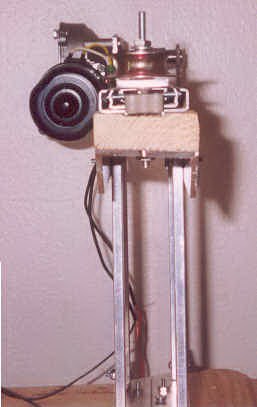
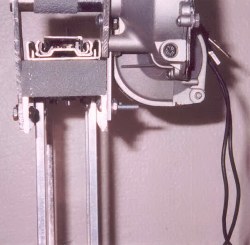
Fully retracted motor side view.
"I used the aluminum to make the support a little lighter. I want to try and keep most of the weight in the lower section." Doug.

Fully retracted shaft side support view.
"The green thing is a big rubber band attached to the back of the claws. When the arm extends the rubber band pulls tight and the claws open up and when the arm retracts the claws close. The rubber band is only temporary until I can find the right spring, but hey it still works pretty good though." Doug.
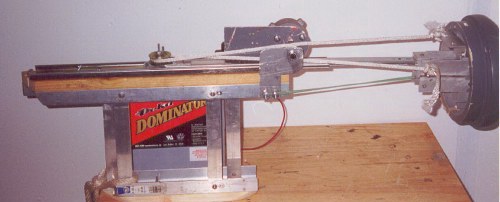
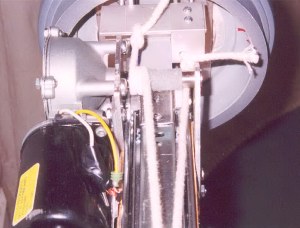
Halfway extended shaft side view.
"Since I took those pics I have redone the bottom platform rewrapped the line with several turns like your original to prevent slipping and have what I like to call streamlined the brackets on the motor and axle. I thought the brackets where sticking out a little more than I wanted. Plus it gives me just a little bit more room inside the torso and it looks better." Doug.
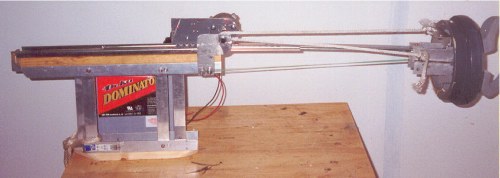
Fully extended shaft side view. 18" of extension!!!
This mechanism extends and retracts at 4.5" per second.
That's 4 seconds to fully extend or retract 18".
Notice the claw is opened at full extension.
"There is a slight bend in the extended position because of the weight of the resin wrist and resin claws. I like your idea of bolting a bar on top of it to keep it from bending. That would probably solve that problem." Doug.

Front view fully extended, claw opened.
Here's a close up of the mech fully extended from the previous photo.
Materials & Parts
Aluminum channel, flat bar and angle.
Aluminum or metal scraps to make brackets.
Nuts and bolts.
Clothes line rope.
20" heavy duty drawer slides (2).

Surplus Windshield Wiper motors (2), available from:
http://www.meci.com/ their Part Number 420-0578 $15.95 each+ship
or
http://www.allelectronics.com/ their Cat. # DCM-171 $19.75+ship
or
http://www.sciplus.com/ their Cat. # 33048 $19.50+ship
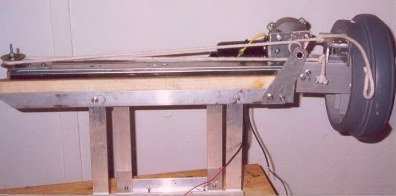
"The drawer slides are 20" D806 series ball-bearing side mount drawer slides made by Liberty and purchased at Home Depot. I bought the 20" after measuring inside the torso but after I assembled it onto the stand that I built, I found that it stuck out a little further than it was supposed to. The one thing that I did not take into consideration was putting the wrist up to the torso and then measuring. After I did that I found I needed to cut off about 2". The final extension is almost 18" and takes right at 4 seconds to complete. " Doug.
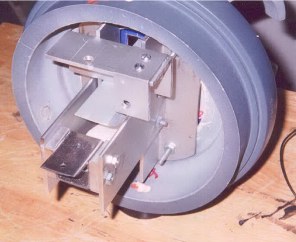
Axle bracket.
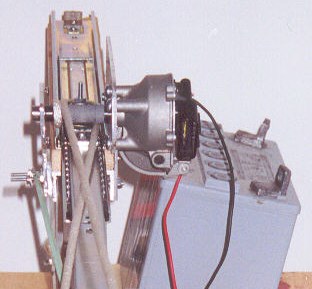
Back View.

"I modified the motors slightly so they would fit into the arm socket better. You can see it in the pics. Basically what I did was to remove the black plastic connection on the back. You really only need the 2 wires (yellow and white) coming from the back of the motor anyway." Doug. (Notice the flat gearbox cover plate where the original terminal connector was.)

Actually when Doug says he modified the motors slightly, the following is what he did to remove the connector on the backside. First cut the 2 wires off the connector and drill out and/or grind off the 5 heads of the gear case cover rivets.

Then use a screwdriver to pry off the cover.

Here is what is behind the terminal enclosure. Now you have two choices. You can remove the contact assemblies from the gearbox cover plate and make a piece of plastic or metal to cover the holes. Or do what Doug did and use this cover to trace onto another piece of aluminum and make a new gearbox cover without the holes. Then pull out the original rivets and finish drilling through the holes in the gear case and bolt on the new or modified cover plate on with some 6-32 screws and nuts. (You might want to put a small bead of silicone around the edge to form a gasket around the cover plate before you bolt it on.)

I just put this picture in to show what it looks like all apart, for the curious, since I had it mostly apart anyway.
Front View.

Motor shaft with crank arm removed.

Not a lot of length, but enough to add an axle extension onto as Doug describes below.
"I made the connection to the short threaded shaft on the motor by using a hollow bar that fit tightly over the threaded shaft and then drilled a hole through it and slid a pin in it ( it was a tight fitting pin) to keep it from coming out." Doug.

Streamlined brackets. Also note you can see here why Doug modified the motor gearbox cover.
"I had to mount the motor as far forward as I could get it, to get max extension. Part of the motor actually sits a few inches outside of the arm socket but the bellows covers it up so no one will even know. The gray thing on the shaft is a semi-soft porous rubber with an adhesive backing. I used it so the clothes line would get a better grip to keep it from slipping on the shaft. I got it at the hardware store and it works good." Doug.

"The arms I am currently using have a 7 1/4" OD so I cut 7" holes for the arm socket." Doug.
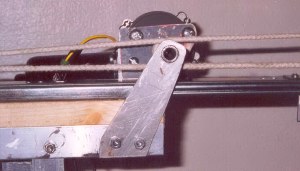
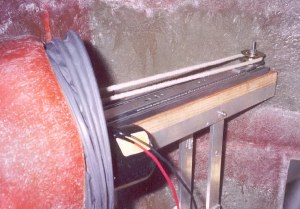
These are the wrist brackets for attaching the drawer slide to and drive cable and allow for claws to fit and pivot. First 2 vertical angle pieces are attached to the inside of the wrist. They are what retain the 2 screws/axles for the claws to pivot on. Attached to these angles are 2 pieces of flat bar that the drawer slide attaching bracket (piece in center with 2 holes in it) is bolted to with a couple spacer blocks. A couple pieces of angle were added at the top with 1/4" holes in them for the drive rope to attach to. You could also get fancy and attach a couple of eyelets to these for the cable tie offs.

"If you look at the back where the pulley sits you will see that there is a 1/8" thick piece of aluminum attached onto the top of the slide. I mounted the pulley to it and this allowed me to squeeze out an extra 1/2" on the extension part. Because I first cut off 2" when the pulley got close to the shaft on the motor the extension stopped. I measured it from there and found that it stopped short about 1/2" before I wanted it to. By putting the pulley on the 1/8" aluminum piece I was able to set it up a little higher and then the pulley was able to sit farther back in the torso." Doug.

"I secured them to a wooden platform and then used the holes on the lazy Susan to secure it to. I had no problem with the robot wanting to tip over, mainly because the lower half of my b9 weighs about 150lbs or better." Doug.

Since we didn't get a picture of Doug's wooden platform, here is mine that will be attached to the lazy Susan on my donut assembly.

I used 1/2" thick MDF and cut down the outer edge to 3/8" thickness far enough in to clear the bottom opening in the torso.

With my 1/4" donut top finish ring in place only 1/8" of the platform edge will be visible from the base of the torso.

"The length of the aluminum channel that the drawer slide is on is 18", the length on the bottom is 7-1/2" next to the vent opening and 10" on the piece nearest to the center of the torso. I did it that way because I was trying to go with the curve inside the torso." Doug.
"The good thing about your arm mech design is you can custom make it to fit." Doug.
He's Alive!!
I wish I could have been there when he powered these arms up. There is nothing more exciting than when you hit that switch after they're both installed with the arm bellows on and he reaches out!
I'm sure Doug would like to hear from you about his arm mechanisms, if you have any questions or comments,
you can reach him at:
Go to Wrists and Claws